Graph Representation
Notation
We will denote:
- $G = (V, E)$ as a graph.
- $|V| = n$
- $|E| = m$
Sparse vs Dense Graphs
Review the concepts of sparse and dense graphs.
Real-world graphs are usually sparse. Keep this in mind when choosing a representation.
List of Edges
This is the least common and simplest way to represent a graph.
A graph is simply a list of edges $(u, v)$.
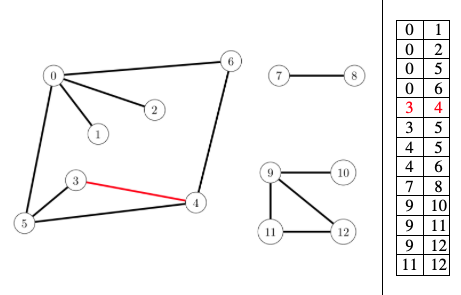
The edges look sorted in the above figure, but in reality, there is no sorting of edges. It really depends on how you add them to the list.
- Access to neighbors is expensive: $O(|E|)$.
- Inserting an edge is cheap: $O(1)$.
- Deleting an edge is also similarly expensive: $O(|E|)$.
- Space efficient for sparse graphs: $O(|E|)$.
Summary:
- Desirable for really sparse graphs.
- Not very common in practice.
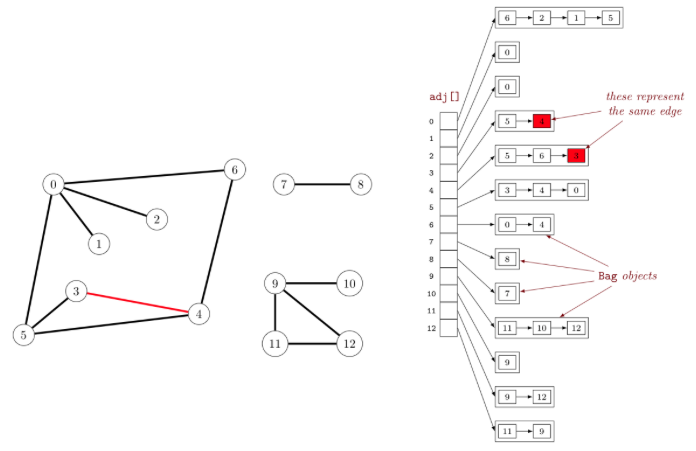
Adjacency List
Basically a dictionary where the keys are the vertices and the values are list of vertices that are neighbors.
- Access to outgoing edges is cheap: $O(1)$
- Hash table lookup of vertex
- Access to incoming edges is expensive: $O(|V| + |E|)$
- Go through all vertices and check if an edge exists
- Inserting an edge is cheap: $O(1)$
- Deleting an edge is expensive: $O(|E|)$
- To delete $(u, v)$, find and delete $v$ from the adjacency list of $u$ (and maybe $u$ from the adjacency list of $v$ in case of an undirected graph)
- Space efficient for sparse graphs: $O(|V| + |E|)$
Summary:
- Good for sparse graphs, which is common in practice.
- Problems in practice require frequent access to neighbors, so a real advantage over list of edges.
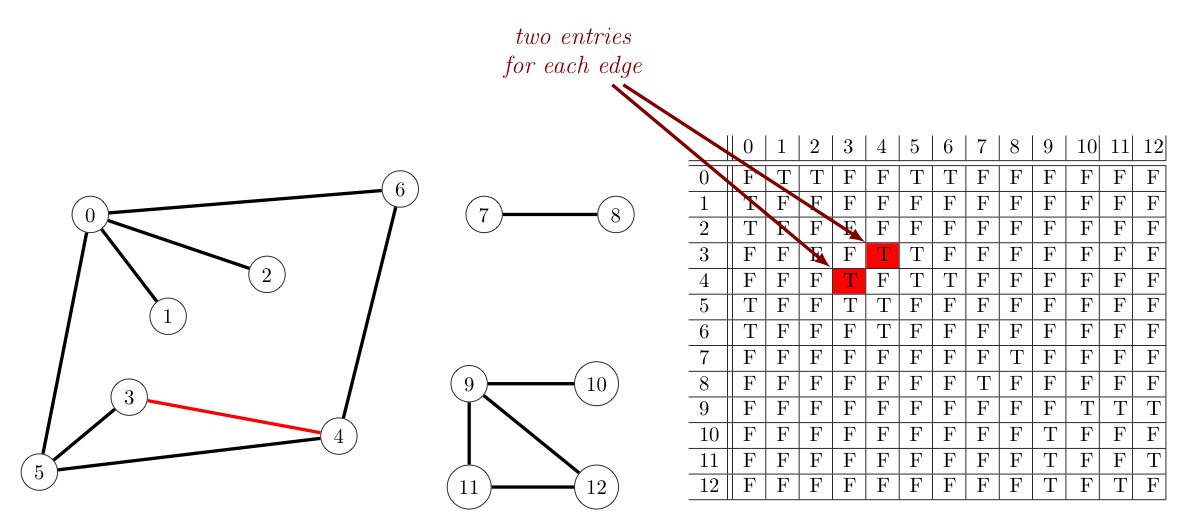
Adjacency Matrix
Use a matrix of $n \times n$ where $n = |V|$.
Initially, all elements are set to a falsey value. If there is an edge between $u$ and $v$, set m[u][v] to a truthy value.
- Access to neighbors: $O(|V|)$
- $\forall v \in V$, go through
m[u][v]
- $\forall v \in V$, go through
- Inserting an edge is cheap: $O(1)$
- Deleting an edge is cheap: $O(1)$
- Not space efficient, since it always reserves space for a complete graph: $O(|V|^2)$
Summary:
- Good for dense graphs.
Total Summary
- For sparse graphs, use adjacency list.
- For dense graphs, use adjacency matrix.
- List of edges is not very common in practice.
References: